主动噪声与振动控制的技术演进与应用前景
原创:小原
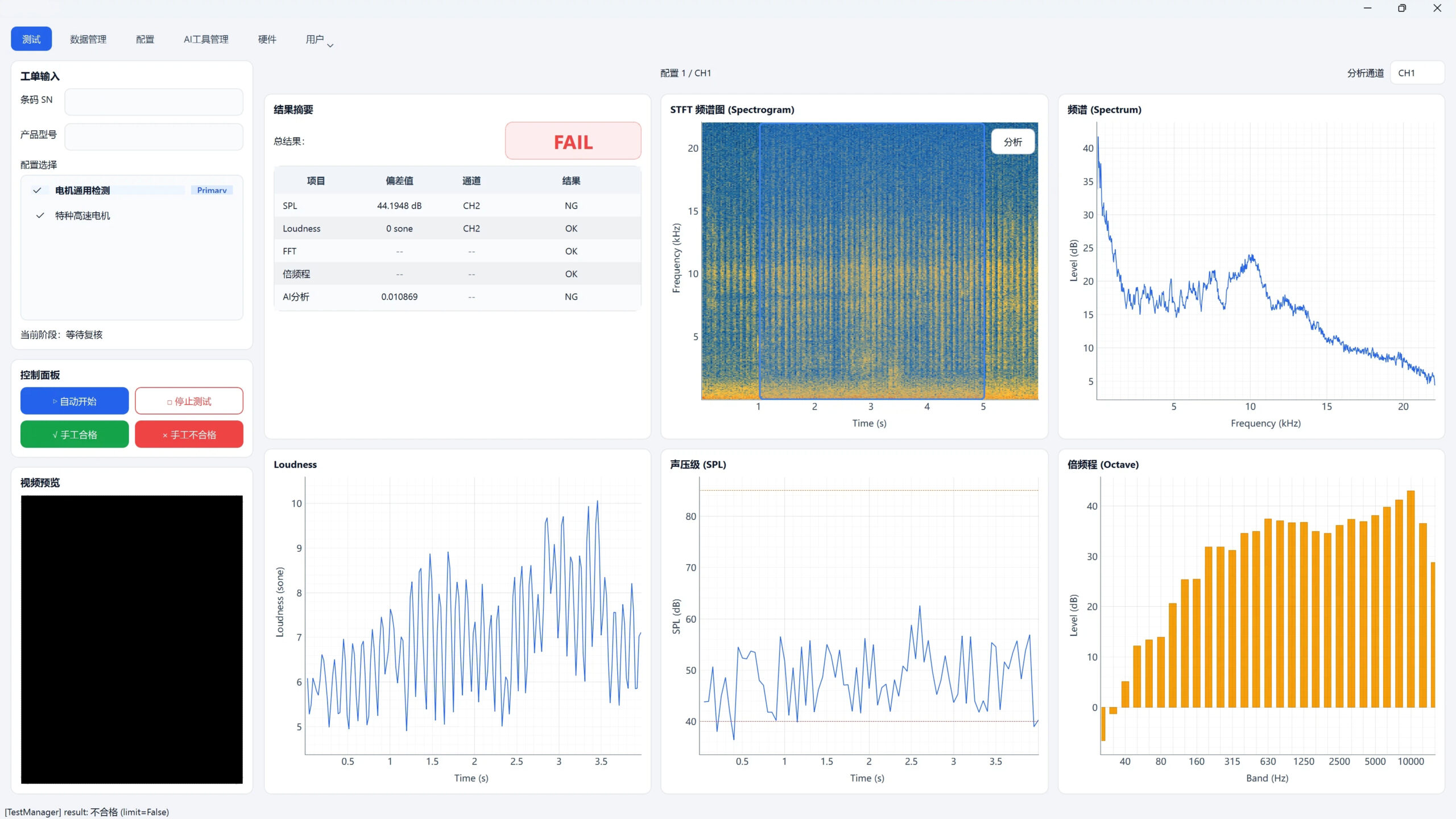
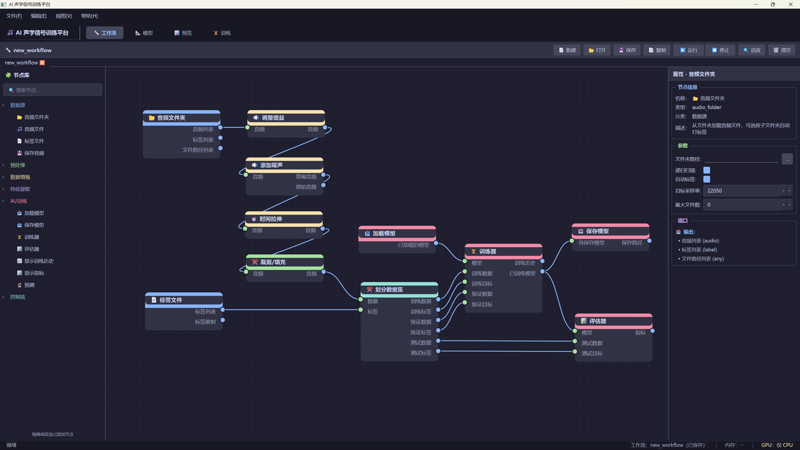
苏州东原电子的主动噪声控制与 👉异音检测系统👈,结合智能声学算法和机器听觉技术,能够实时捕捉微弱异常声学信号,并在复杂噪声环境中有效分离关键声源,实现对设备异常和潜在故障的精准识别。
在现代工业社会中,噪声污染已成为继空气污染和水污染之后的第三大环境公害。根据世界卫生组织的最新报告,长期暴露于 65 分贝以上的环境噪声会导致心血管疾病、睡眠障碍和认知功能下降。传统被动噪声控制技术(如隔声罩、吸声材料)在应对低频噪声时存在明显局限:其隔声效果遵循质量定律,即面密度增加一倍,隔声量仅提高 6dB,这导致高效低频隔声需要庞大笨重的结构。
主动噪声与振动控制(ANVC)技术代表着噪声控制领域的范式转移。该技术基于声波的相消干涉原理,通过产生与原始噪声幅值相等、相位相反(180° 相位差)的次级声波来实现噪声抵消。与被动控制相比,ANVC 技术在低频范围(通常 20-500Hz)具有显著优势,可实现 10-30dB 的降噪量,同时大大减少空间占用和重量。
一、历史演进:从理论萌芽到工程实践
1.理论基础阶段(1930s-1950s)
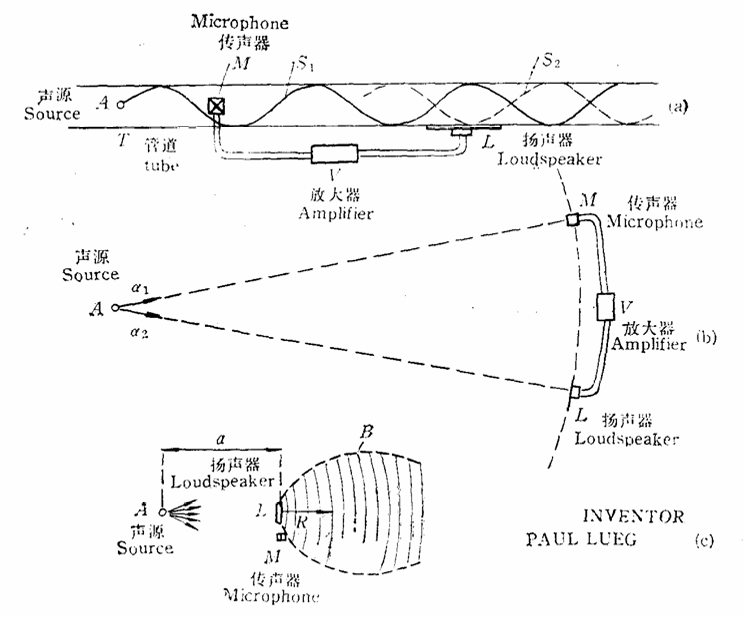
1936 年,德国物理学家 Paul Lueg 首次在专利中提出主动噪声控制的基本概念。他描述了利用声波干涉原理,通过电子系统产生“抗噪声”(anti-noise)来抵消原始噪声的方法。该专利中详细说明了采用 microphone 拾取噪声,经电子管放大器相位反转后驱动扬声器的系统架构。
1953 年,Harry Olson 和 Everard May 在 RCA 实验室研制出首个电子吸声器(electronic sound absorber)。该装置采用模拟电路实现,能够对特定频率的噪声产生 20dB 的衰减。Olson 在《声学学会杂志》(JASA)上发表的论文中明确指出:“这种电子方法为噪声控制提供了全新的途径,特别是在低频领域。”
2.技术突破阶段(1970s-1990s)
1970 年代,数字信号处理技术的出现为 ANVC 带来革命性进展。1979 年,Jesse Jones 教授团队成功实现首个数字式主动控制系统,采用 8 位微处理器实现实时控制。1982 年,该团队研制出首个实用化的主动耳机原型,采用 Motorola 56001 DSP 芯片,采样率达到 48kHz。
1987 年,Stephen Elliott 和 Philip Nelson 的专著《主动声控制》系统建立了 ANVC 的理论框架。他们推导出最优控制器的频域解:
其中 Pxd 为参考信号与期望信号的互功率谱,Pxx 为参考信号的自功率谱。
3.产业化阶段(2000s至今)
2000 年后,ANVC 技术开始大规模商业化应用。Bose 公司推出首款商用主动降噪耳机 QuietComfort,采用专利的 TriPort 声学结构和高性能 DSP 算法。在汽车领域,2006 年本田雅阁首次配备主动噪声控制系统,通过车厢内扬声器抵消发动机噪声。
二、核心技术原理与数学模型
1.声波干涉理论
主动噪声控制基于声波的线性叠加原理。设原始噪声声波为:
次级声波为:
总声场为:
2.自适应算法核心
最常用的滤波x最小均方(FxLMS)算法权值更新公式:
其中:
- W(n) 为第n时刻的滤波器权值向量
- μ 为收敛步长(0<μ<2/λmax,λmax为输入自相关矩阵的最大特征值)
- e(n) 为误差信号
- X'(n) 为经过次级路径估计滤波的参考信号向量
3.次级路径建模
次级路径传递函数估计采用 LMS 算法:
其中 v(n) 为辅助白噪声信号,功率比主信号低 20-30dB。
三、系统架构与关键技术
1.前馈控制系统
前馈系统结构如下:
参考传感器 → 抗混叠滤波器 → ADC → 数字控制器 → DAC → 重构滤波器 → 功率放大器 → 次级声源
↓
误差传感器 → 抗混叠滤波器 → ADC → 自适应算法更新关键参数要求:
- ADC 采样率:至少 2 倍于最高控制频率(通常 20-2000Hz)
- 系统延迟:小于最高控制频率周期的 10%(对于 500Hz,延迟 <200μs)
- 计算精度:16 位定点或 32 位浮点 DSP
2.反馈控制系统
当无法获取参考信号时采用反馈结构,其传递函数为:
其中 C(z) 为控制器传递函数,S(z) 为次级路径传递函数。
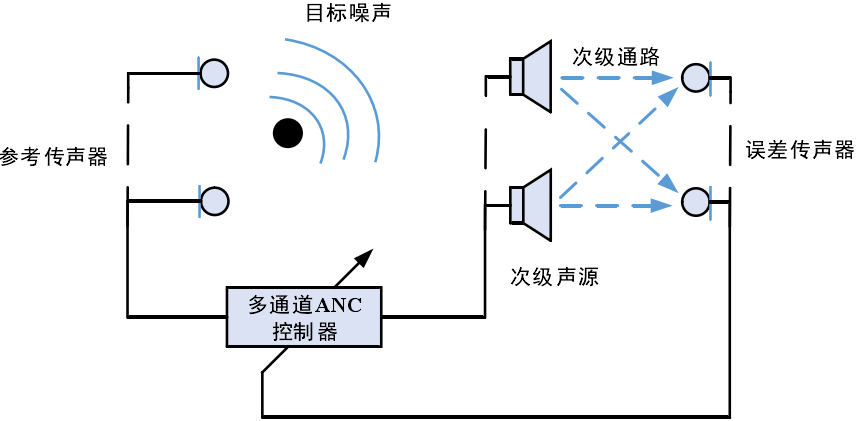
3.多通道系统
对于三维空间全局控制,需要采用多输入多输出(MIMO)系统。N 个次级声源和 M 个误差传感器的系统可用传递函数矩阵表示:
最优控制力向量为:
其中 G+ 为传递函数矩阵的伪逆。
四、技术挑战与解决方案
1.时延补偿技术
系统总时延包括:
- 传感器响应:50-100μs
- 抗混叠滤波器:100-200μs
- ADC转换:20-50μs
- 算法处理:50-200μs
- DAC转换:20-50μs
- 重构滤波器:100-200μs
- 功放和扬声器:100-500μs
采用预测算法补偿时延:
其中 L 为预测步长,等于系统总时延对应的采样点数。
2.非线性补偿
扬声器非线性采用 Hammerstein 模型补偿:
其中 f(·) 为静态非线性函数,采用多项式拟合:
3.稳定性保障
采用泄漏 LMS 算法提高数值稳定性:
其中 α 为泄漏因子(通常 10-6-10-3)。
五、工程应用案例深度分析
1.航空领域:波音 787 梦想客机
波音 787 的 ANVC 系统技术参数:
- 控制频率范围:50-500Hz
- 误差传感器数量:36个(布置于客舱侧壁和天花板)
- 次级声源数量:24个(集成于客舱娱乐系统)
- 处理器:双核 DSP,处理能力 10GFLOPS
- 降噪效果:12-15dB(在发动机叶片通过频率处) 系统采用分区控制策略,将客舱分为 8 个独立控制区域,每个区域配置 4-6 个误差传感器和 3-4 个次级声源。
2.汽车领域:宝马7系路噪控制系统
技术特点:
- 参考传感器:12 个加速度计(安装于底盘和悬挂)
- 误差传感器:6 个麦克风(车厢内)
- 次级声源:4 个低音扬声器
- 控制带宽:30-150Hz(主要针对轮胎噪声)
- 处理器:专用 ASIC 芯片,延迟 <100μs 系统采用多参考前馈结构,每个参考信号独立处理,通过相干性分析选择最优参考信号。
3.工业领域:管道有源消声器
某化工厂风机管道 ANVC 系统:
- 管道直径:1.2 米
- 控制频率:120Hz(风机基频)
- 次级声源:4 个环形阵列扬声器
- 误差传感器:8 个麦克风
- 降噪量:25dB(单频)
六、结语
从 1936 年的一个奇妙想法,到今天改变千万人生活的实用技术,主动降噪的发展历程展现了科技创新的魅力。它不仅仅是一项技术,更是一种对生活质量的追求,体现了科技以人为本的理念。
在这个越来越喧闹的世界里,主动降噪技术为我们提供了一种选择:可以选择安静,可以选择专注,也可以选择在需要的时候与喧嚣保持距离。或许,这就是科技最美的样子——不是冷冰冰的参数和指标,而是让生活变得更美好的温暖力量。
🤝我们能为您提供的支持🤝